In my last blog post,
I took you by the hand and guided you through
the realm of convolutions. I hope to have made it clear why it makes
sense to discretize functions and represent them as vector, and how
to calculate the convolution of 1D and 2D vectors.
In this post I want to talk a little about how Image Processing was
done in the old times, and show the relation between the procedures
performed back then and the kinds of parameters learnt by
Convolutional Neural Networks (CNN). In fact, do notice that CNNs
have been lurking around for years
(LeNet
had been introduced in 1998!) before they went viral again in
2012 (with the AlexNet), so, in a way, they are concurrent models to
the models described below.
It is hard to tell why Convolutional Neural Networks took so long to
become popular. One reason might be that Neural Networks
had gone somewhat out of fashion for a while until their revival
some years ago.
(Hugo Larochelle
commented in this TEDx video how there were papers that were rejected
simply based on the argument that his approach used Neural Networks.)
Another contributing factor might be that, for a long time, it was a
common belief for many people that Neural Networks with many layers
were not good (despite the work with
LSTMs being
done in Europe). They were taken as “hard to train” and empirically
many experiments ended up producing better performances for models
with just a few (or even only one) layer. CNNs, however, did not
suffer from these problems (at least not that much), and the LeNet
paper from 1998 had already 5 layers.
But my focus here is not on the architecture of CNNs, nor on their
gradient flow or their history. My focus here is on how exactly we
can say that the shared weights of a CNN results in a mathematical
formulation that is identical to that of the Convolutions that we
discussed in the previous post.
Image Processing
Before I go into the CNNs I want to show why a Convolutional is
something that we might want to do to an image. In my previous post,
I tried to be as generic as possible, talking about functions and
vectors, speaking from a “signal processing” point of
view. It turns out that the Image Processing community has its own
perspective. So, from now on, I will take $f$ as a 2D image that I
want to somehow process, and to $g$ as a
kernel.
When we learn math in school, we learn names of several functions that
are known to be useful, and somehow represent well parts of the world
we live in. Examples of such functions are $log$, $ln$, $sin$, or
$tg$.
When we are introduced to statistics, we get acquainted to several
other names, such as “correlation”, “standard deviation”, “variance”,
“mean” or “mode”. The types of kernels used in Image Processing are
not different: researchers in the area have found through the years
several kernels that are known to perform well different kinds of
tasks, such as blurring, edge detection, sharpening, etc.
You can find a list of such kernels in the
Wikipedia article.
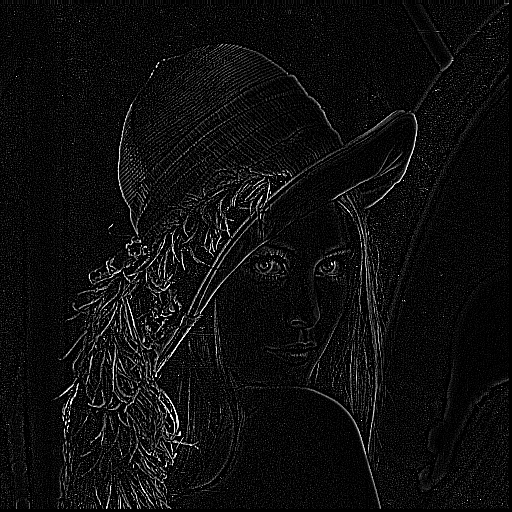
I want to show how a convolution could be used to find the edges
of an image. But this time, I don’t want to show formulas; I think
some Python code should make things clearer. Let’s say we want to
find the borders of the following image of
Lenna:
The first thing to do is to load the image:
fromPILimportImageimg=Image.open('lenna.bmp')
Then I want to create a function to convolve the image
with the kernel:
# import numpy as np
defconvolve(image,kernel):# Flips the kernel both left-to-right and up-to-down
kernel=np.fliplr(np.flipud(kernel))# Transforms the image into something that numpy can process
image_array=np.array(image)# Initializes the image I want to return
new_image_array=np.zeros(image_array.shape)# Convolve
foriinrange(image_array.shape[0]-kernel.shape[0]):forjinrange(image_array.shape[1]-kernel.shape[1]):# run_kernel will perform the pointwise multiplication
# followed by sum
new_image_array[i][j]=run_kernel(image_array,kernel,i,j)# Creates a new Image object
new_image=Image.fromarray(new_image_array)# Returns both the image as an array, and as an Image object
returnnew_image_array,new_image
As you can see, I am using numpy to perform the calculations. I
expect you not to find it hard to understand the code. It could
obviously be written much more efficiently (numpy actually even
has a function that performs the convolution anyway), but I wanted
to show how the operations we saw in the last blog post can be easily
translated into some piece of code.
Now we need to define that run_kernel() function. It calculates the
$\odot$ operation between the part of the image that we are interested
in and the (already flipped) kernel. This is as simple as:
What we are missing is just the right kernel. If you look at the
Wikipedia page you’ll see that there are several kernels usable for
Edge detection. I’ll use the third one:
If you look carefully at this new image, you’ll see that I’m not
running run_kernel() in the last pixels (and then you’ll find some
columns of zero pixels at the right of the image, as well as some
some rows at the bottom). This has to do with what I called the “Border
Problem” in my last post.
It is actually very unclear what should be done in the edges of the
Image we are trying to process. The way I have been doing so far, if I
calculate a convolution between two $3 \times 3$ matrices, it will
give me only one number. If you think well about what the size of the
final output would be, you will see that it depends on the kernel size.
Let’s assume that our final image has $n$ pixels both horizontally and
vertically.
For a kernel of size $1 \times 1$ (i.e., just a number), the size of
the final image would be the same as the size of the original image
If the kernel were $2 \times 2$, then the output would have size
$n-1 \times n-1$. For a $3 \times 3$ kernel, it would be
$n-2 \times n-2$. You can see how this generalizes to
$n-(k+1) \times n-(k+1)$, where $k$ is the size of the kernel.
It would be nice if I could find ways to get
a result that had the same size of the input image. The most obvious
way to do this is to assume that there are zeros beyond the borders
of the images. If you think that the images are signals just like
the signals from my previous blog post, you should feel that this is
a very reasonable assumption to make. Using this assumptions,
you will see three types of convolutions:
Valid: This is the way I have been doing it so far. We don’t
assume any information apart from what we have.
Full: This is the case where we assume there are lots of zeros
beyond that the edge of the original image. This way, if we
were given the image $f$ below, then it would be
“transformed” into the $f_{transformed}$ below before
convolving. The number of new rows/columns introduced depends
on the size of the kernel. As I said, this should make sense
from the perspective of signal processing I described in my
previous post.
(if this is not clear enough, you are welcome to take a look at
this amazing explanation I found in Stack Overflow)
Same: This is a little trickier. It also assume zeros around
the image, but only as much as needed to return an output that
has the exact same size as the input image. I tend to find it
hard to visualize, but I found that
this image
helped a lot.
Relation to Convolutional Neural Networks
Ok… so I think we covered everything there was to cover about
Convolutions. Now I just need to answer: how do they relate to CNNs?
Remember how the convolutions are being calculated: for a given point
in “time”, we multiply the values of both matrices pointwise and then
sum them all.
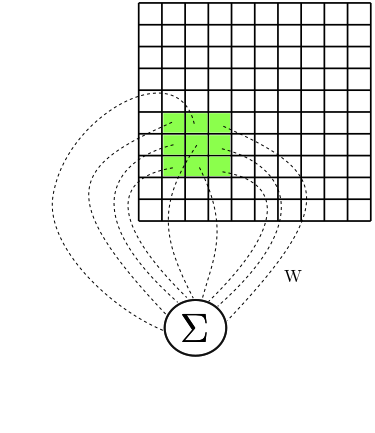
Now… remember how the connections of the Convolutional Layer are
organized:
Let’s look at one neuron individually. I’d like to call it $a$.
It has access to a certain
rectangular part of the image. Let’s represent the values of this
rectangular part by $A$. So, for example, $A_{0,0}$ represents the
element in the leftmost and topmost corner of that rectangular part
of the image that our neuron $a$ has access to.
Now, let’s say that $W$ is a matrix with the weights corresponding
to the connections between $a$ and the values in $A$. Then
the input to $a$ is calculated as
Doesn’t this look a lot like the $\odot$ operation from our kernels?
It looks a lot like I am running run_kernel() giving as input the
subimage $A$ and the kernel $W$.
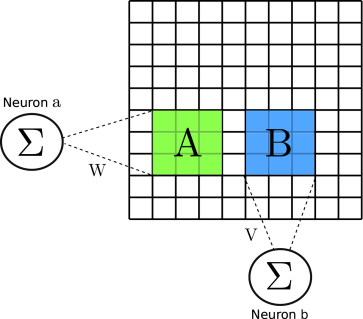
Now, let’s focus on another neuron, $b$, and again use a new matrix
$B$ to represent the rectangular part of the image that our second
neuron has access to. (I hope you see where this is going.)
Again, let $V$ denote a matrix composed of the weights of the
connections between $b$ and $B$. Then, again, the input to $b$ is
calculated as
Again, it looks a lot like I just calculated $B \odot V$, doesn’t it?
If this is hard to see with the formulas, the following image should
help a little. It shows the subimages $A$ and $B$, and the connections
$W$ and $V$, and how the values are summed when given as input to our
neurons $a$ and $b$:
Ok, so now you know that the Convolutional layer is running our
$\odot$ operation on small subparts of the image.
There is just one last point to be made: Convolutional Neural Networks
use shared weights. This means the $W = V$! And this also means that
the kernel $W$ (or $V$) is always the same for whichever neuron you
choose. This means that if I chose at random any new neuron $c$ to
inspect (and defined $C$ as the matrix corresponding to the rectangular
part of the input image that $c$ has access to), then the calculation
that I would perform would still be
In summary, this means that the operation these layers are performing
is identical to a Convolution!
Why do we want CNNs?
Now you could ask me: ok, the Image Processing community knows all
of these kernels that do magic with my images. Why would I care to
have a complex architecture that ends up doing exactly the same
kind of thing?
The answer I am going to give is simple, but has huge implications.
So far, the Image Processing community had to use their knowledge
about how real images generally look like and burn a lot of their
own neurons (I mean, figuratively) to generate kernels that somehow
fit the problems they were trying to solve. So, if they wanted to
find characteristics in the images that would help them to solve the
problem they were trying to solve, they had to manually invent
kernels that they deemed useful for their task. Many of these kernels
followed some patterns/constraints of, e.g., summing up to 1, so
that the values of the output image wouldn’t saturate. These patterns
somehow limited the types kernels that one could invent, and it was
very unintuitive to create anything following different patterns.
But what if, instead of creating kernels by hand (and being bound
by constraints, and by our intuition) we could just give a lot of
data to a statistical model and just hope that it learns something
useful in the end? This is exactly what Convolutional Neural
Networks are for. The kernels that are learnt by the CNN are
generally not very intuitive, and probably no human would have
easily guessed that they are useful for the tasks that these networks
are trying to solve (be it classification, of segmentation, or
whatever). Still, they have shown great results, and (I would
go so far as to say that) the times of “handcrafted feature
engineering” are probably over.
Bonus: Shifting a Signal
Before concluding this blog post, I want to show how convolutions
can be unexpectedly useful to perform some seemingly unrelated task:
the shifting of a signal. I learnt this in the
Neural Turing Machines paper
and found it a very elegant way of solving the problem. In this
section, I’ll go back to my old notation and refer to the 1D signal
$f$. Let’s say it is a discrete signals represented by the
following vector:
\[f = [0,0,0,3,4,5,4,3,0,0]\]
Now let’s say I want to shift all elements of $f$ to the right. How
would I do? One way to do it could be to make a “same” convolution
of $f$ with a function $g = [1,0,0]$. Let’s see how this would work.
This example should also give an intuition of how convolutions are a
good way of processing signals. In the case of the Neural Turing
Machines, instead of shifting the signals so “binarily” to the right
or to the left, they allow continuous values to the positions of $g$.
For example, $g$ could be anything like $[0.8, 0.1, 0.1]$. In that
case, most of the signal would be shifted, but part of the
information would remain “spread” (“blurred”) through other positions
of the signal. While this may be unintuitive, we have seen how
unintuitive things may actually be useful for solving some tasks.
Conclusion
I hope to have given a good notion of how CNNs relate to the
convolutions we saw in the previous post. My hope is that this will
provide a good intuition for how convolutions can be used for other
Machine Learning architectures, and allow you to think of convolutions
as just some other tool that you can use to solve your problems.
As you can see, all of this is very simple, but I wish someone had
shown me these ideas when I started learning, instead of having to
learn them all by myself. I hope this post makes it easy to extend
architectures based on convolutions in a way that is sensible
taking into account everything discussed here.
For quite some time already I have been wanting to write this blog
post. A little more than one year ago I got acquainted to
Convolutional Neural Networks, and it didn’t immediately strike me why
they are called that way. I eventually read
this blog post
that helped a lot to clarify things; but I thought I could try to
give more details on what exactly is meant when one says
“Convolution” here.
This blog post builds upon the description given
there,
so, if you still didn’t read that, stop reading this and go there
take a look at that blog post. I may overlap some of the discussions
here with the discussions there.
In the sections that follow, I’ll introduce convolutions (actually,
I’ll let Kahn Academy do that for me), then introduce a procedure
to calculate it, motivate a discussion about discrete convolutions,
show why it makes sense to represent the convolving functions as
vectors and extend the definition to the 2D space. The next blog post
will explain why these are useful for signal processing and what is
their relation with Convolutional Neural Networks.
Convolutions
Convolutions are a very common operation in signal processing. While
the colah’s blog post
presents it in a more abstract/intuitive statistical way, I find that
a more gore calculus-driven introduction from Kahn Academy might help
you realize that the concept is just an integral:
In this
Kahn Academy video, Sal found a closed formula for the convolution
by solving the integral. Given that a convolution is an integral,
you might consider that it represents the area below some curve.
But what curve exactly? I’ll discuss more about it in the next section.
For now, what is worth is to understand that there several ways in
which you can think of convolutions, and it might help a lot if
you allow yourself to switch views at different points in time.
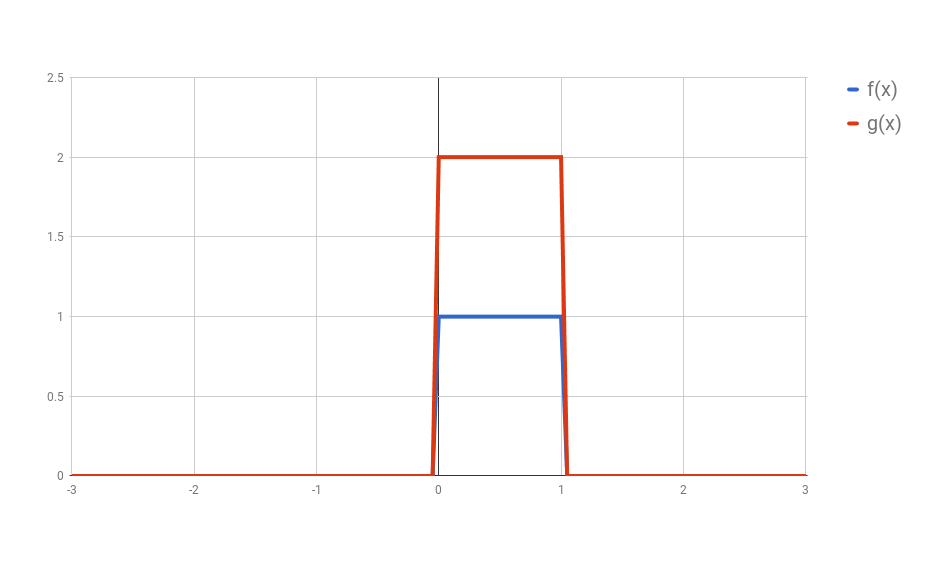
What these images are saying is that you can calculate the value of the
convolution $f \ast g$ at the point $t$ by following a very simple
procedure. I’ll define two functions $f$ and $g$ to make the steps
easier to follow. Let
(I used Google Spreadsheets to do this, so you’ll notice the
lines are not exact, but you should be able to get the idea)
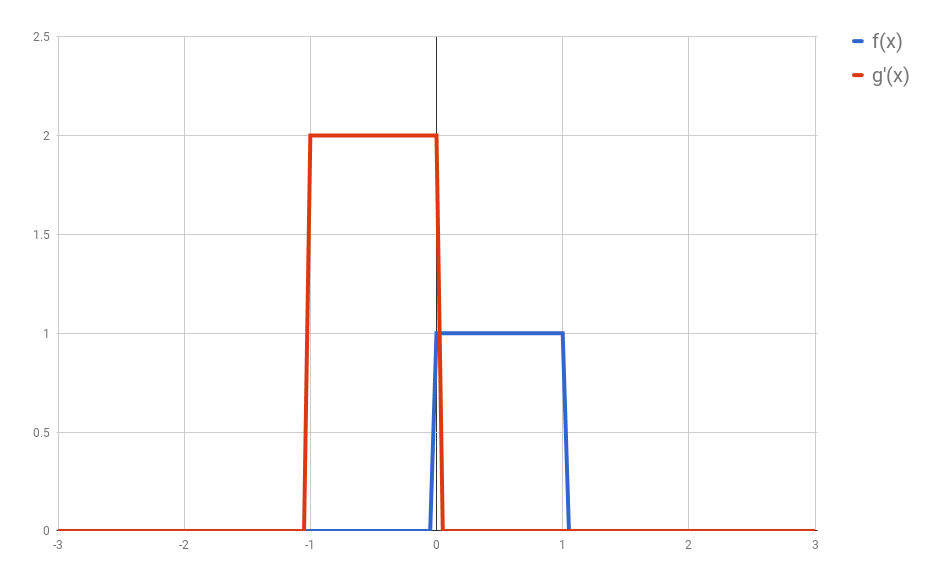
First: flip $g$ horizontally (i.e., $g(x) <- g(-x)$).
Let’s give the flipped $g$ a name, say $g’$. (if you don’t flip $g$,
then what you are calculating has actually the name of “cross-correlation”,
and is simply another typical operation in signal processing.).
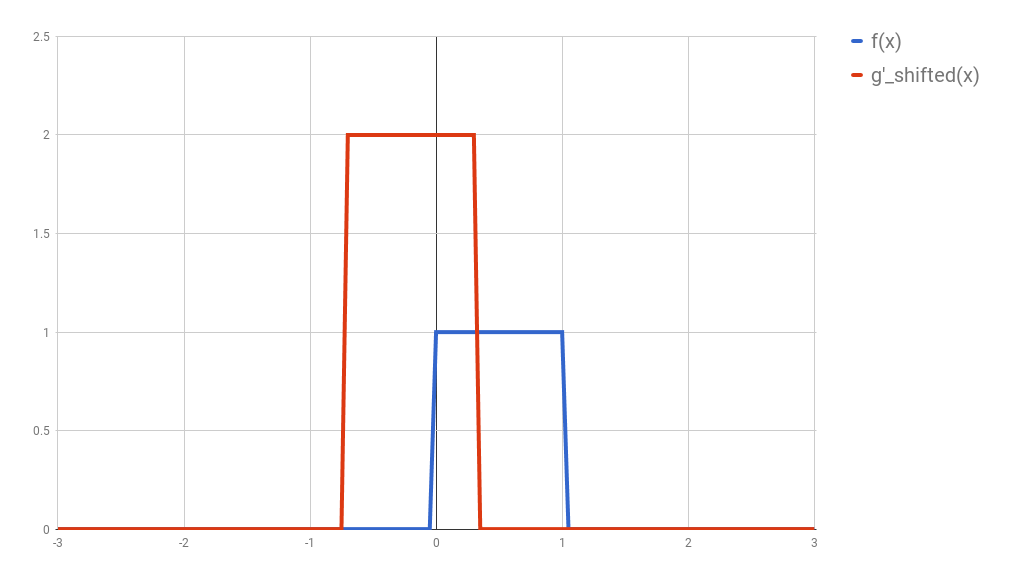
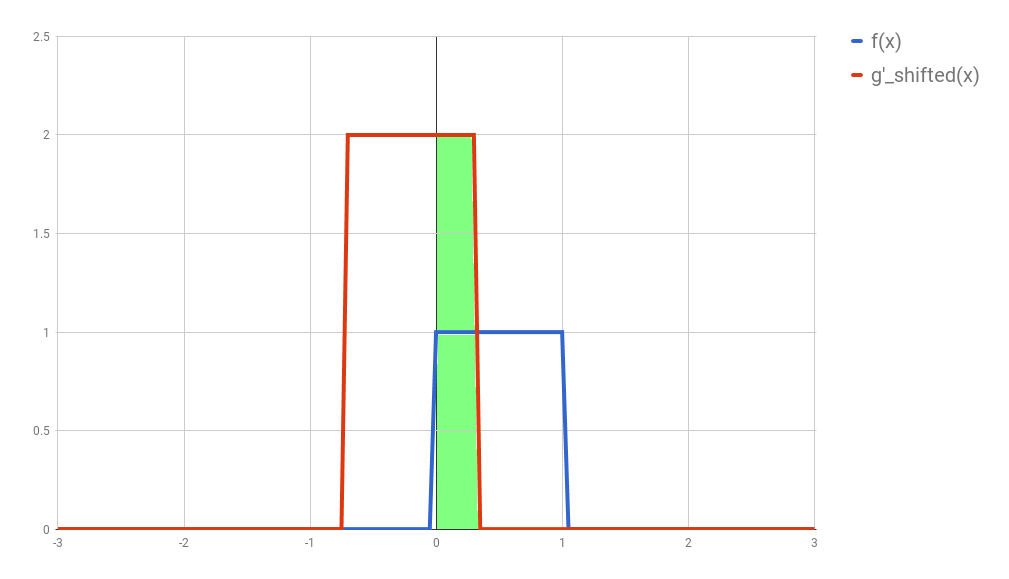
Second: shift $g’$ horizontally by $t$ units. If $t$ is
positive, then $g’$ will be shifted to the right; otherwise, it will
be shifted to the left. For our example, let’s say that $t=0.3$.
I’ll call this function $g_{shifted}’$
Third: this is the step where the problems arise.
Now what you want is actually multiply the two
curves are each point between $-\infty$ and $+\infty$ and calculate the
area below the curve that this multiplication will form.
Let’s assume that the functions are zero most of the time (just like
in our example), and non-zero only in a small section of their domain.
Because we are multiplying the two values, we only care about the values
where both functions are not 0. In all other cases, the integral will
be 0 anyway. Let’s assume that both functions are non-zero only in an
interval $[a, b]$. In this case, our problem reduces to calculating the
integral of the multiplication of $f$ and $g_{shifted}’$ inside that
interval. Now it could still be a challenge to calculate the
integral of the $g_{shifted}’$ and “f” in that interval.
(While searching for a way to understand this procedure, I came across
this very nice demo.
In it you can define your own functions and play arround to find out
how the convolution is going to be.)
The problem with
continuous convolutions is that we would have to actually calculate
an integral. But what if our function were actually “discrete”?
Fortunately for us, most applications on Image Processing require
discrete signals, and for our purposes it would be perfectly ok to
discretize these continuous signals.
After discretization, All the concepts we have discussed so far would
follow the same logic. Now,
instead of an integral we now have a sum. So, given the interval
$[a, b]$, we could calculate the convolution as
Note: the avid reader may notice that the integral of an interval
spanning only a point should have been 0 (and therefore the convolution
should always have become 0 after the discretization). The reason why
this does not work has to do with the
dirac delta function,
and I won’t go into many details here. You can just assume that the
discretized version of the signal is a sum of dirac delta
functions.
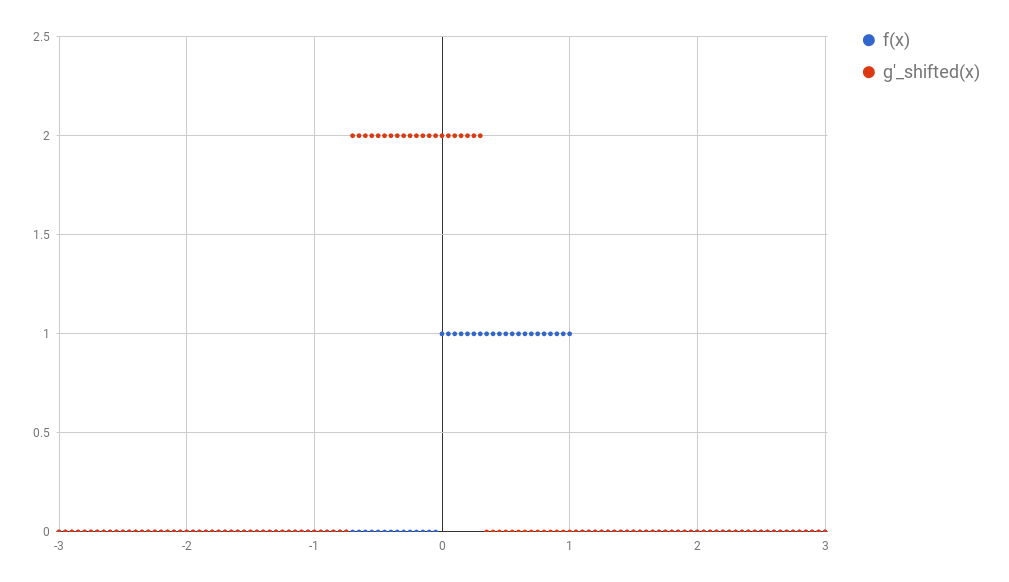
In the example above I discretized the functions using 1 point for
each 0.05 step in $x$. This would make the discussion below very hard
to understand. So, to make things simpler, in all the text that
follows I’ll use steps of 0.25 instead. The image below shows how the
original functions $f$ and $g$ would look like discretized this way.
1D discrete convolutions
It turns out that the functions $f$ and $g$ used in convolutions are
in reality most of the times composed almost entirely by zeros (as
assumed before). This allows
for a much more compact representation of the functions as a vector of
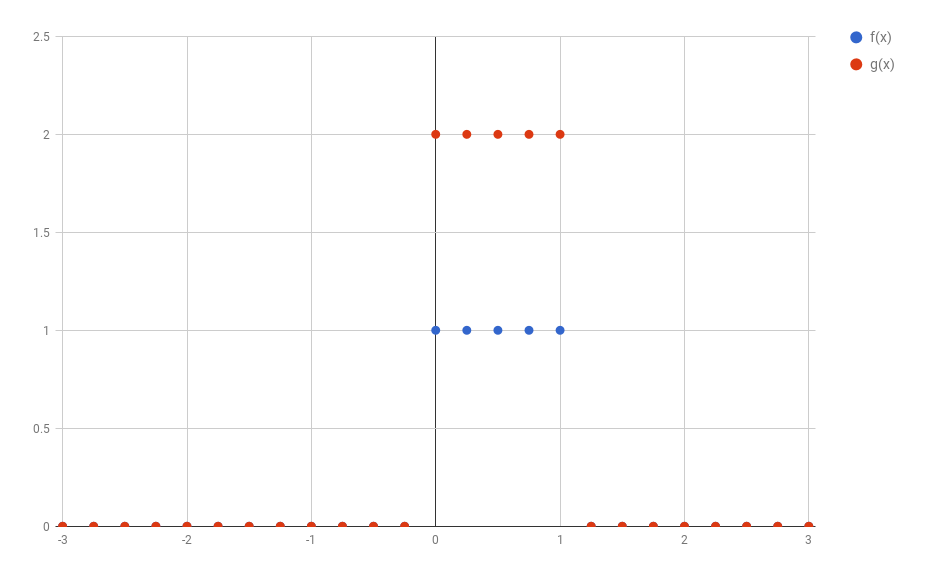
values. For example, $f$ and $g$ could be represented as:
\(f = [\dots 0, 0, 1, 1, 1, 1, 0, 0, \dots] \\
g = [\dots 0, 0, 2, 2, 2, 2, 0, 0, \dots] \\\)
(Of course, the number of 1 and 2 depends on how the discretization was performed)
Now let’s say I’d like to calculate the value of the convolution
between $f$ and $g$ at the point $t = $some coordinate. It is hard
to point the exact place, so I’ll make the place bold:
Unfortunately, these are still vectors with an infinite number of
dimensions, which are hard to store in our limited storage computers.
It is worth noting that very often the functions $f$ and $g$ for which
we want to calculate a convolution are 0 most of the time.
Since we know that the result of the convolution in these regions
will be zero, we can just drop all of the zeros:
\(\begin{align*}
f &= [0, 0, 0, 0, 1, 1, 1, 1, 0, 0] \\
g &= [0, 0, 0, 0, 2, 2, 2, 2, 0, 0] \\
(f \ast g) &= [0, 2, 4, 6, 8, 6, 4, 2, 0, 0] \\
\end{align*}\)
(As you can see, I kept some of the zeros. I could have removed them. It was my choice)
And congratulations, we just arrived in a very compact representation
of our functions.
Note: The entire discussion so far supposed that we would keep
$f$ still and always transform $g$ according to our three steps to
calculate the convolutions. It turns out that convolutions are
commutative, and therefore the entire procedure would have also
worked by holding $g$ still and changing $f$ in the same way.
(Incidentally, they are also
associative)
But what does all of this mean?
When I started talking about convolutions, I said that they are used
a lot in the context of signal processing. It might be a good idea to
forget that these vectors are functions for a while and consider them
signals.
(this video
might help to convince you that this is a sensible idea.)
In that case, what a convolution is doing is taking two
signals as input and generating a new one based on those two. How
the new signal looks like depends on where both signals are non-zero.
In the next blog post you’ll see how this can be used in meaningful
ways, like finding borders in an image, blurring an image, or even
shifting a signal in a certain direction.
Most importantly, convolutions are a very simple operation (composed
of sums and multiplications that can be done parallely), which can
be easily implemented in hardware. They are a great tool to have in
hand when solving difficult problems.
2D Convolutions
It shouldn’t be a big leap to extend these concepts to the 2D space.
Let us skip all the discussion about continuous functions and vectors
with infinitely many elements and consider our current state:
functions $f$ and $g$ are represented as small vectors, and we want to
calculate the convolution of those two functions (vectors) at any
point $t$. If we now define new $f$ and $g$ in a 2D space, then we can
represent them as matrices. For example, if we now redefine $f$ as
(Do not forget: I was the one who decided to keep a border with zeros.
I could have left many more columns and rows with zeros in the borders.
This may seem irrelevant for now, but will be useful when we discuss
kernels in the next blog post.)
Let us define a new $g$, that after discretization looks like the
following:
How would the convolution then be calculated? Same steps:
Flip the matrix $g$ (both horizontally and vertically), generating
$g’$.
Shift $g’$ (according to the place where you want to evaluate the
convolution). Basically, you want to align $g’$ with some part of
$f$.
Multiply the aligned elements and sum their result.
An example calculated by hand
Before concluding this blog post, I want to calculate an example by
hand. If you did not understand everything so far, this should
clarify whatever is missing. Let’s define two new functions $f$ and
$g$, that, after discretization and “vectorization”, become the
following matrices:
If you think of $f$ as an image, you might interpret it as two
diagonal lines (the values with 6) surrounded by some “shade” (the
values with 3). The function $g$, on the other hand, is hard to
interpret. I chose a very asymmetric matrix to show how the
flipping (the first step in our calculation) affects the final values
in $g$.
Let’s calculate $(f \ast g)(0,0)$. First is to flip $g$ to create
$g’$:
Then we align the matrix $g’$ with the part of $f$ that corresponds
to position $(0,0)$. This
part might cause some confusion. Where exactly is $(0,0)$? There is
no actual “right answer” to where this point should be after
discretization, and we don’t have the original function formula to
help us find out. I’ll call this “the border problem” and refer to
it in the next blog post. For now, I’ll just align with the points
“we know” and forget about any zeros that might lurk beyond the
border of the matrix representing $f$. This will give us a so-called
“valid” convolution.
Finally, we need to multiply each element pointwise and sum all of
the results. To make things clearer, if $A$ and $B$ denoted the two
matrices of same size that we now have, then what we want to do is:
\[A \odot B = \sum_{i,j}{f_{i,j} \times g_{i,j}}\]
Where I am representing this “pointwise multiplication followed by
sum” by the operator $\odot$. In our specific case, we get:
In this blog post I expect to have given you a very intuitive
understanding
of how convolutions are calculated and a notion of what they are
doing. It should help you to make the connection between all those
integrals you find in Kahn Academy or Wikipedia and
the discrete convolution operation you see in some Neural Networks.
If none of this still happened, the examples of the next blog post
will definitely help you to realize what is going on.
I had not planned for this blog post to become so long. In the next
blog post I’ll show applications of convolutions from the image
processing field, and how they connect to Convolutional Neural
Networks. As a bonus, I want to show a very elegant application
of convolutions from the Neural Turing Machines.
Stay tuned =)
UPDATE: Thanks to Fotini Simistira for pointing some mistakes in
my calculations.
When I started getting in touch with Artificial Intelligence (AI), no one
could give me a clear
distinction between all those buzzwords such as “Artificial Intelligence”,
“Pattern Recognition”, “Data Mining” and “Machine Learning” (ML). It took
me a long time to actually be able to dintinguish the meaning of these,
and, to say the truth, it is still not very clear to me how exactly the
first three relate to each other. The meaning of “Machine Learning”,
however, is very simple, and I believe it should have been made clearer
from day one. This post has the goal of separating “Machine Learning”
from this mess, making it very clear when something is ML and when
something is not, and what the relation between ML and AI is.
That said, while I do expect you to have a perfect notion of what is and
what is not part of the field after you read this blog post, I don’t
intend to give you a better definition of the expression “Machine
Learning” than the definitions you may have already found in other places
in the web.
Why the confusion?
When I sat down to write this blog post, I thought of taking a look at
how others have defined the field before (because, of course, I didn’t
expect to come up with any magic new definition). I came across this video
(from the amazing course on Machine Learning in Coursera by Andrew Ng):
And this video:
If you watch them, you will see these three field definitions:
Field of study that gives computers the ability to learn without being
explicitly programmed.
A computer program is said to learn from experience E with respect to
some task T and some performance measure P if its performance on T,
as measured by P, improves with experience E.
These first two definitions are good, because they make it clear that
the programmer doesn’t tell explicitly what the machine should do: the
behavior of the machine is completely dependent on the data it has
previously seen (and of course the ways in which the machine learns).
"The extraction of knowledge from data"
A problem with this last definition is that it does not clarify who
extracts the knowledge from the data. If the programmer writes rules that
conform to the patterns in the data, does this count as Machine Learning?
(more on this in the next section)
If you look back at these three definitions, they may cause you
to be confused about what exactly the relation between Machine Learning
and other fields is. Why is it “Machine Learning” and not, say,
“Artificial Intelligence”? (and how is it related to AI, in the first
place?) And when am I applying AI that is not ML? And can I apply ML
that is not AI?
So… how do I explain this?
A simple story
As I said, I don’t actually intend to give any better definition. Any
definition I could present here could be probably invalidated after any
amount of some more “socratic” scrutinity. Instead, (and following the
field itself,) my explanation is based on examples.
Say you are a photographer who takes two types of pictures: (1)
landscapes; and (2) people’s faces (say, for their CV). Let’s assume
you have them all stored in a folder in your computer. One fine day you
decided to organize your pictures into two folders (landscapes and
cv). You started dumping some of your stored photos into the two
folders, but after some 50000 images you realized they were too many
and thought it would be nice to have some automatic method to do that.
In the lack of a better idea, you decide that an easy way to check if
the image is of a human is to count the ammount of pixels that have a
color similar to a human skin color. You create a rule that says
something like “if the image has more than 500 pixels of those colors,
then it is a cv picture”.
You write a program that counts the number of pixels of those colors in
your images and moves the files to the respective folder. You run your
program and realize that you cv folder now has a lot of images of
sandy landscapes. Your program did not do what you hoped it would.
You look better at the images you had already classified, trying to
find patterns that could help you to identify the two types of images.
You make, say, a histogram of the colors in the two types of images and
realize that there is a set of
rules that you could apply that would work in most of your cases. You
implement those rules, run your program, and feel relatively satisfied:
you did as well as you could.
Was this AI? Was this ML? (1)
Now… look back at the story and think about it: did you just make
AI? I would say that the answer should probably be yes: if your
program had worked, someone who has never seen what your program does
would have most probably believed your program was “intelligent”. On the
other hand, your rules were engineered by you, and the machine was only
supposed to apply them to decide what to do. While you may feel you
“taught” the machine what it should do in each case, all the teaching
was done through “explicit programming” (see the first definition of
Machine Learning in the previous section).
In other words: it was not the machine who learnt; it was you.
Revisiting your story
You think you could achieve some better performance, but you are not
sure exactly how. Instead of simply counting the colors of your pixels
and using this to conclude the type of the image, you think it would
be a nice idea to use some fancy image processing techniques. You
recall something called the “Discrete Fourier Transformation”, that
allows you to get a representation of the images in the “frequency
domain”. You apply it to some of your already classified, and realize
that, truly, the cv pictures have a very specific pattern of
frequencies that you can develop some set of rules for… and
anything that does not conform to that pattern seem to be a landscape.
You implement your algorithm and feel a little more confident that
this time there are fewer errors.
On the other hand, could you say you just did ML? My answer is still
no: it is not because you applied some fancy “feature extraction”
algorithm to understand your data that you are now doing Machine
Learning. Again, all the extraction of knowledge is done by you, and
you just explicitly instructed the machine to follow what you
considered to be the best set of rules you could think of.
So… well… then… actually… when is it ML?
Let’s look one last time to your story. You came a long way until here:
used some exploratory statistics
to find what the colors in each type of images can tell about them,
and also what frequency patterns your images most commonly have. You
implemented a rule-based classifier
that decided in which folder to put each one of your images.
But you feel all of these rules you developed are not good enough. It
would be great if the program could learn by itself what folder to put
each image in, based on examples of images of each type. Enter Machine
Learning!
When you apply Machine Learning, you don’t want to tell what rules to
use: you give data, and you expect the program to figure out by itself
what to do. For example, let’s say you still have those 50000 images
you had manually classified in the beginning of our story. Let’s say
you heard of some popular image classification model called
Convolutional Neural Network
for which you found some code in the internet
and would like to try. In this case, for each one of your 50000
“training” images, you also tell the model what is the answer you
expect it to give back (i.e., either cv or landscape). When you
start, the model makes a lot of mistakes, outputting many times cv
when it was supposed to output landscape, and vice-versa. But every
time it makes a mistake, it updates its internal variables in
a way that causes it to become more likely to answer right the next time.
When the model is done training, you should expect it to answer right
most of the times (at least for those 50000 images you were using to
train it).
Now that it is done training, you put those 50000 images aside and
use the already trained model to put all of your other images in their
respective folder. Notice that you didn’t tell the model what to look
for in each image. You may have told it how to update its internal
variables, but you didn’t explicitly develop any rule. The “rules”
were found by the model itself. It learned them!
Some final thoughts
Machine Learning is a huge field, and is going through some nice hype
in the last few years. The example I gave in the previous subsections
uses something called “Supervised Learning”,
which is when you tell the model
what is the expected answer for each training instance. There are
other models for which you don’t have to explicitly point out
the “right answer” every time (and that are useful when you don’t have
those 50000 manually labeled examples you trained your Convolutional
Neural Network with).
The models may also learn several different types of things. In the
case of Convolutional Neural Networks, it is actually not 100% clear
what the networks are learning; however, other types of models may
learn, say, rules, just like those you were trying to develop manually
in the beginning of our story.
Other resources
There are a lot of resources in the internet on both AI and ML. There
are some, however, that are my favorites, which I thought of linking
here.
Artificial Intelligence & Personhood:
A video on what could happen if we reach a point when AI becomes
good enough.
(I am linking the entire playlist because I do think that a lot of
the stuff there is absurdly relevant to the topic)
Good morning and welcome to the Black Mesa Transit System. This
automated train is provided for the security and convenience of the
Black Mesa Research Facility personnel. The time is 8:47 AM. Current
topside temperature is 93 degrees with an estimated high of 105. The
Black Mesa Compound is maintained at a pleasant 68 degrees at all
times.
Well… this is a greetings delivered by the Black Mesa Transit
System. In the upcoming weeks I intend to have some serious content
in this blog, which will hopefully replace this dummy blog post.
In the meanwhile, maybe you could take a look at the Poems and Songs
sections in the sidebar =)